
A System To Reproduce Different Animal Locomotion Skills In Robots | Ingrid Fadelli
Categories
Edited | Front Page Stories | All Content | Education | Business | Science | Technology | North America | News | News -- WNT Selected
 Credit: Google
Credit: Google
May 1, 2020 (Tech Xplore) -- Researchers at Google Research and the University of California, Berkeley, have recently developed an imitation learning system that could enable a variety of agile locomotion behaviors in robots.
Their technique, presented in a paper pre-published on arXiv, allows robots to acquire new skills by imitating animals."This project builds on some previous works from computer graphics, which trained simulated characters to move by imitating human motion capture data," Jason Peng, one of the researchers who carried out the study, told TechXplore. "Most of these techniques were primarily applied in simulation, but in our recent project we took a first step towards applying them to real robots."
Peng and his colleagues initially trained a four-legged robot to imitate the movements and walking style of a dog within a simulated environment. Their system was trained on motion data recorded from a real dog, using an approach known as reinforcement learning.
"One of the advantages of training in simulation is that it is very fast, so we can simulate months of training in a matter of days," Peng explained. "Once the robot has been trained in simulation, we can adapt what it has learned to a real robot, using only a few minutes of data collected in the real world."
(more)
-
CreatedFriday, May 01, 2020
-
Last modifiedSunday, May 10, 2020
World Desk Activities

www.niemanlab.org/2024/04/inside-newsweek-ai-exper…

www.journalismfestival.com/programme/2024/reader-r…

Reader revenue beyond the English language – – International Journalism Festival
In the past few months, many news publishers in the US have announced layoffs. Others have tweaked or abandoned their paywalls and pursued more open models.…
phys.org/news/2024-04-surf-clams-coast-virginia-re…

Surf clams off the coast of Virginia reappear and rebound
The Atlantic surf clam, an economically valuable species that is the main ingredient in clam chowder and fried clam strips, has returned to Virginia waters…
medicalxpress.com/news/2024-04-antibiotics-reveal-…
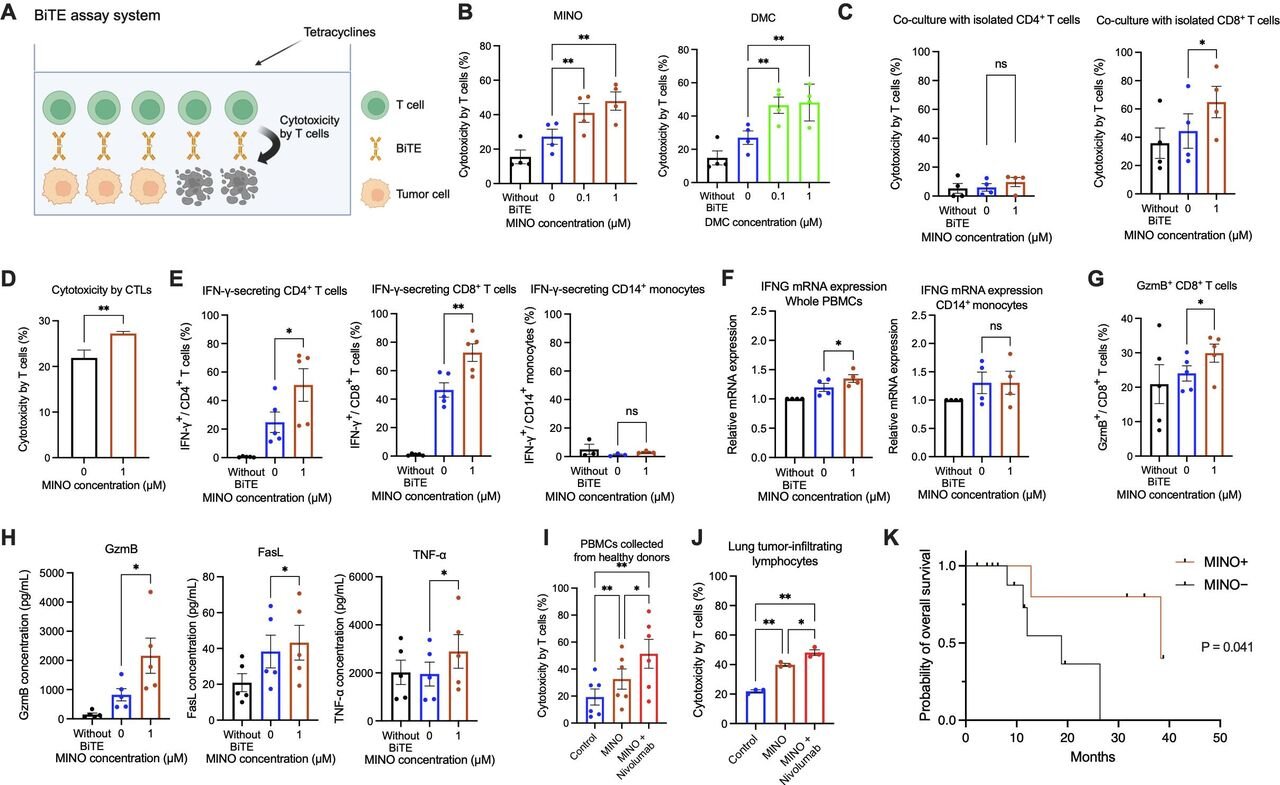
Antibiotics reveal a new way to fight cancer
Cancer cells grow and spread by hiding from the body's immune system. Immunotherapy allows the immune system to find and attack hidden cancer cells, helping…
phys.org/news/2024-04-crucial-quantum-internet.htm…
Crucial connection for 'quantum internet' made for the first time
Researchers have produced, stored, and retrieved quantum information for the first time, a critical step in quantum networking.
medicalxpress.com/news/2024-04-women-major-complic…

Women who experience major complications during pregnancy found to have increased risk of early death years later
A team of medical researchers from the University of Texas Health Science Center, in the U.S., and Lund University, in Sweden, has found via study…
medicalxpress.com/news/2024-04-common-hiv-treatmen…
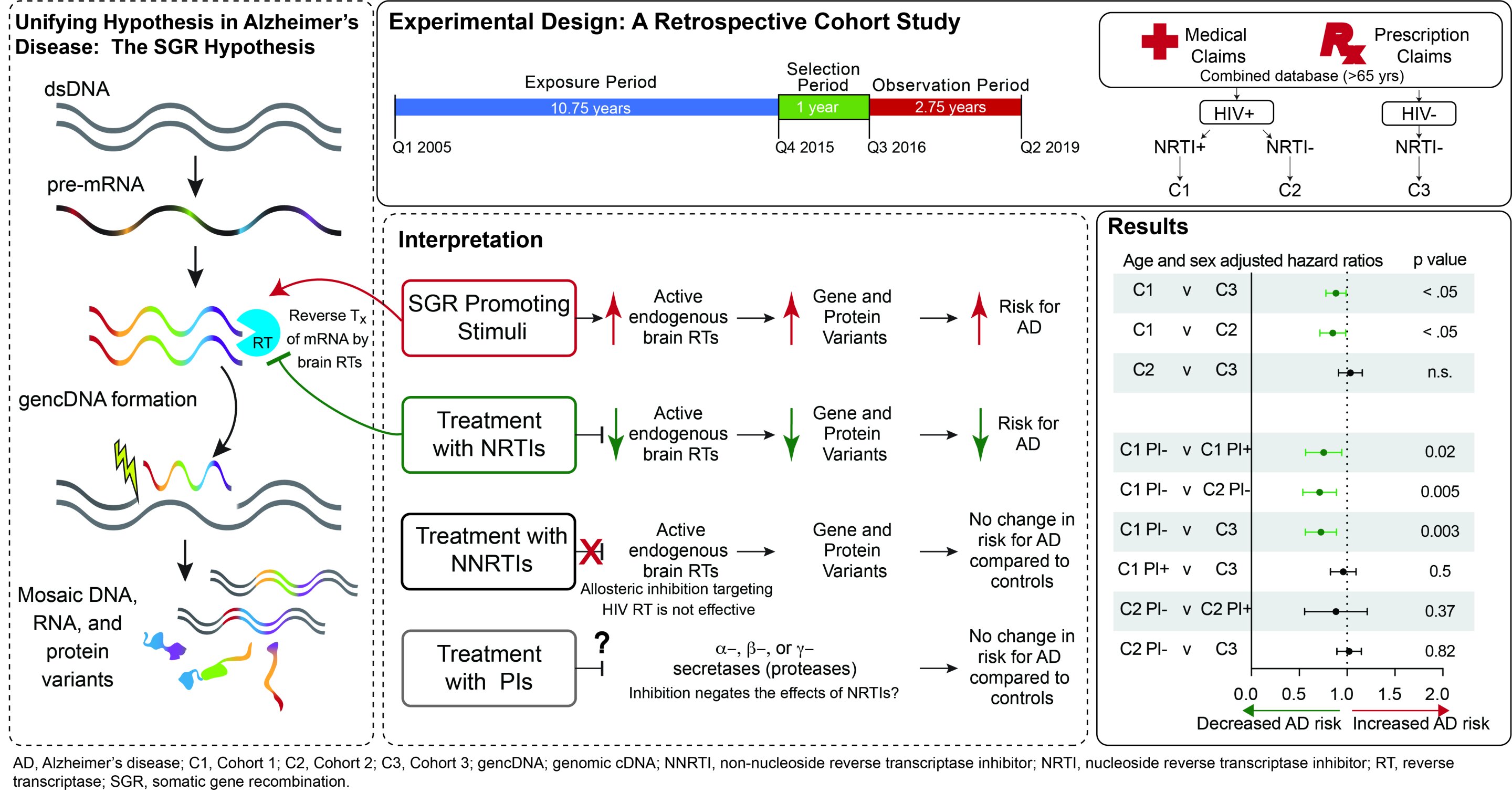
Common HIV treatments may aid Alzheimer's disease patients
Alzheimer's disease (AD) currently afflicts nearly seven million people in the U.S. With this number expected to grow to nearly 13 million by 2050, the…
medicalxpress.com/news/2024-04-adolescent-stress-p…

Study suggests adolescent stress may raise risk of postpartum depression in adults
In a new study, a Johns Hopkins Medicine-led research team reports that social stress during adolescence in female mice later results in prolonged elevation of…
medicalxpress.com/news/2024-04-positive-effect-mel…
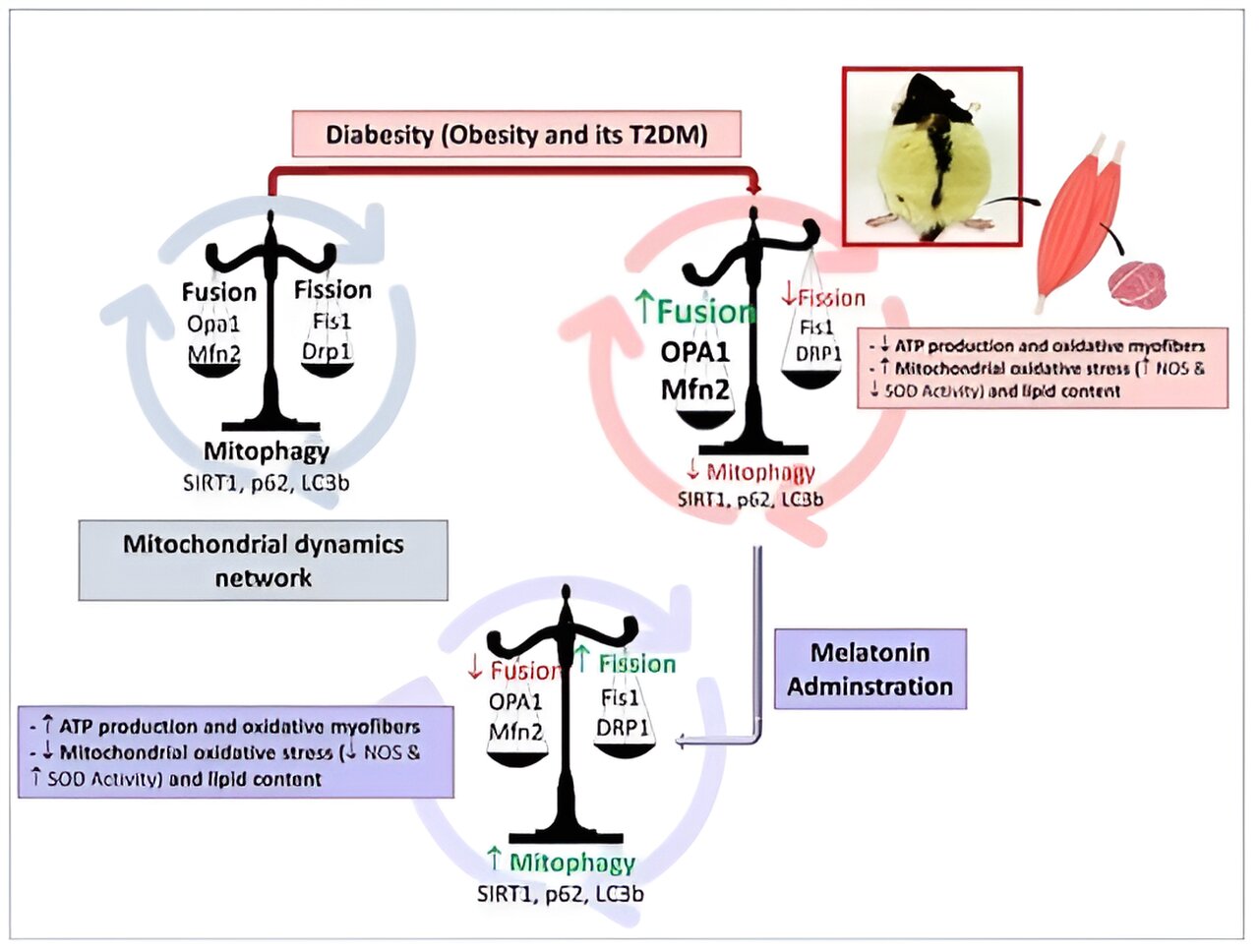
Researchers demonstrate the positive effect of melatonin in the prevention of obesity
Two international studies led by the University of Granada (UGR) have confirmed that melatonin helps prevent obesity. In addition, its effects are positive against visceral…
medicalxpress.com/news/2024-04-fecal-transplants-p…
Researchers conclude fecal transplants can rid patients of resistant gut bacteria
Transferring fecal microbiota from healthy donors to the intestines of chronically ill people has beneficial effects on these recipients' gut bacteria, also in the longer…
Latest Stories








Electronic Frontier Foundation
-
Internet Service Providers Plan to Subvert Net Neutrality. Don’t Let Them
April 19, 2024
-
EFF, Human Rights Organizations Call for Urgent Action in Case of Alaa Abd El Fattah
April 19, 2024
-
Congress: Don't Let Anyone Own The Law
April 19, 2024
-
Two Years Post-Roe: A Better Understanding of Digital Threats
April 18, 2024
The Intercept
-
Since October, Sen. John Fetterman Has Been Building a Roster of Republican Donors
April 19, 2024
-
Idaho Goes to the Supreme Court to Argue That Pregnant People Are Second-Class Citizens
April 19, 2024
-
U.S. Troops in Niger Say They’re “Stranded” and Can’t Get Mail, Medicine
April 18, 2024
-
Columbia Suspends Ilhan Omar’s Daughter One Day After Omar Grilled School Administrators
April 18, 2024
VTDigger
-
LAST DAY: 3X your gift and send a children’s book
April 19, 2024
-
Roger Ormiston
April 19, 2024
-
Final Reading: In the Vermont Senate, Friday afternoons are for budget building
April 19, 2024
-
Becca Balint to vote in favor of aid to Ukraine, against aid to Israel
April 19, 2024
Mountain Times -- Central Vermont
-
The Mountain Times – Volume 51, Number 16 – April 17-23, 2024
April 17, 2024
-
Weekly Horoscope: April 17-23, 2024
April 17, 2024
-
Bookstock cancels summer event after 14 years
April 17, 2024
-
Crêpe breakfast tradition at sport hill
April 17, 2024
